
Festo annuncia tre nuovi progetti bionici: BionicSoftHand, BionicSoftArm and BionicFinWave
Che sia afferrare, girare, toccare, digitare o premere – nella vita di tutti i giorni, utilizziamo le mani come un strumento naturali per compiere delle mansioni. A tal riguardo, la mano umana, con la sua unica combinazione di forza, destrezza e doti motorie, è una vero e proprio miracoloso strumento della natura. Perché allora non dotare i robot negli spazi di lavoro collaborativi di una pinza basata sul modello naturale, che realizza diversi compiti attraverso l’intelligenza artificiale? Così Festo presenta la nuova mano robotica pneumatica BionicSoftHand alla Fiera di Hannover Messe 2019. Combinata al BionicSoftArm, un robot leggero pneumatico, i Future Concepts sono adatti alla collaborazione tra uomo e robot.
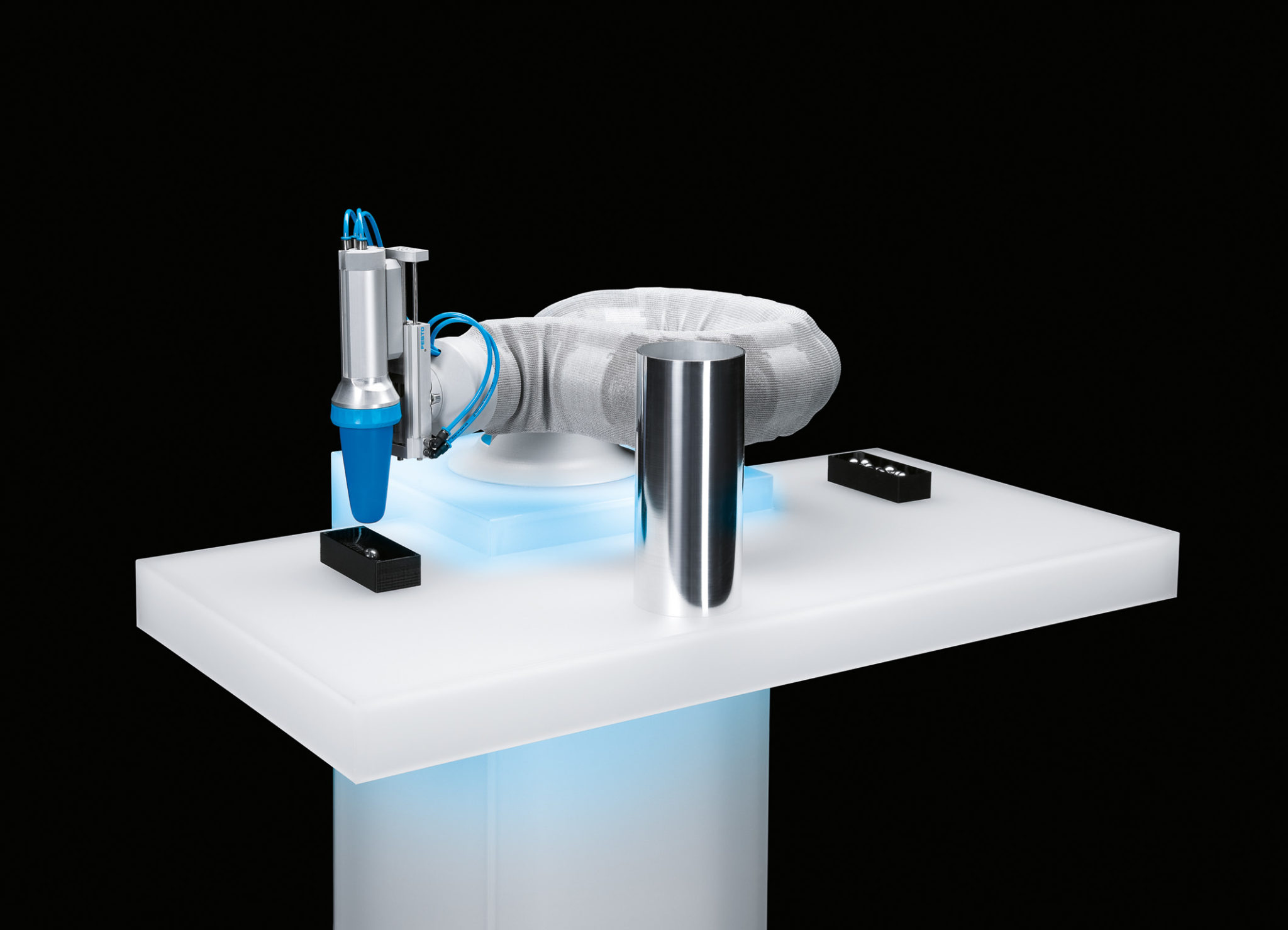
A differenza della mano umana, la BionicSoftHand non ha ossa. Le sue dita consistono in strutture flessibili a soffietto con camere d’aria. È gestita pneumaticamente così che possa interagire direttamente e in sicurezza con le persone. I soffietti racchiusi nelle dita sono rivestiti di uno speciale tessuto 3D lavorato con fili elastici e ad alta resistenza. Con l’aiuto del tessuto è possibile determinare esattamente il punto in cui la struttura si allunga e genera forza e il punto in cui viene impedita l’espansione. Questo rende la mano leggera, flessibile, adattabile e sensibile e, allo stesso tempo, capace di esercitare una forza elevata.
Bionic SoftHand, SoftArm, SoftHand und diverese Greifer, von Festo am Set: Philipp Freudigmann
Intelligenza Artificiale
I metodi di apprendimento delle macchine possono essere comparati con quelli umani: sia in modo positivo che negativo – hanno bisogno di un feedback sulle loro azioni in modo tale da essere classificati e imparare da essi. BionicSoftHand utilizza il metodo Reinforcement Learning, ossia l’apprendimento per rinforzo. Questo vuol dire che: invece di imitare un’azione specifica, la mano raggiunge semplicemente un risultato. La mano raggiunge l’obiettivo attraverso il trial and error method (con diversi tentativi). In base al feedback ricevuto, ottimizza gradualmente le sue azioni fino ad eseguire con successo la mansione prestabilita.
In particolare, la BionicSoftHand viene allenata a ruota un cubo di 12 lati in modo tale che, alla fine, il lato predefinito sia rivolto verso l’alto. La strategia di movimento necessaria viene insegnata in un ambiente virtuale con l’aiuto di un gemello digitale, che viene creato attraverso dati provenienti da una fotocamera di profondità e attraverso l’utilizzo di algoritmi dell’intelligenza artificiale.

Foto: Philipp Freudigmann
Piezo-valvole proporzionale per un controllo preciso
Per mantenere più ridotto possibile il cablaggio necessario per la BionicSoftHand, gli sviluppatori hanno costruito appositamente una piccola unità di valvole, controllata digitalmente, che è applicata direttamente sotto la mano. Questo significa che i tubi per l’attivazione delle dita non devono necessariamente attraversare l’interno braccio del robot. Così, la BionicSoftHand può essere velocemente e facilmente connessa e utilizzata con l’utilizzo di un solo tubo per l’aria di alimentazione e di scarico. Le piezo-valvole proporzionale impiegate permettono il controllo preciso dei movimenti delle dita.
BionicSoftArm: un unico braccio robot, molte possibili varianti
La rigorosa distinzione tra il lavoro umano e le azioni automatiche dei robot continua a diminuire. Le loro aree lavorative si sovrappongono e si fondono insieme in un ambiente collaborativo, così che uomo e macchina possano lavorare simultaneamente sullo stesso pezzo nel futuro – senza doversi schermare l’uno dall’altro per motivi di sicurezza.
La BionicSoftArm è un ulteriore sviluppo compatto del BionicMotionRobot, con uno spettro di applicazione che è stato significativamente ampliato. Questo è reso possibile dalla sua struttura modulare: può essere con fino a sette segnemente pneumatici a soffietto e attuatori rotativi. Ciò garantisce la massima flessibilità in termini di raggio d’azione e movimenti, così da essere in grado, se necessario, di lavorare negli spazi più angusti ed evitare gli ostacoli. Allo stesso tempo, è totalmente flessibile e può lavorare in modo sicuro con le persone. La collaborazione diretta uomo-robot è possibile con il BionicSoftArm, come l’utilizzo nelle classiche applicazioni SCARA, ad esempio le mansioni pick and place.
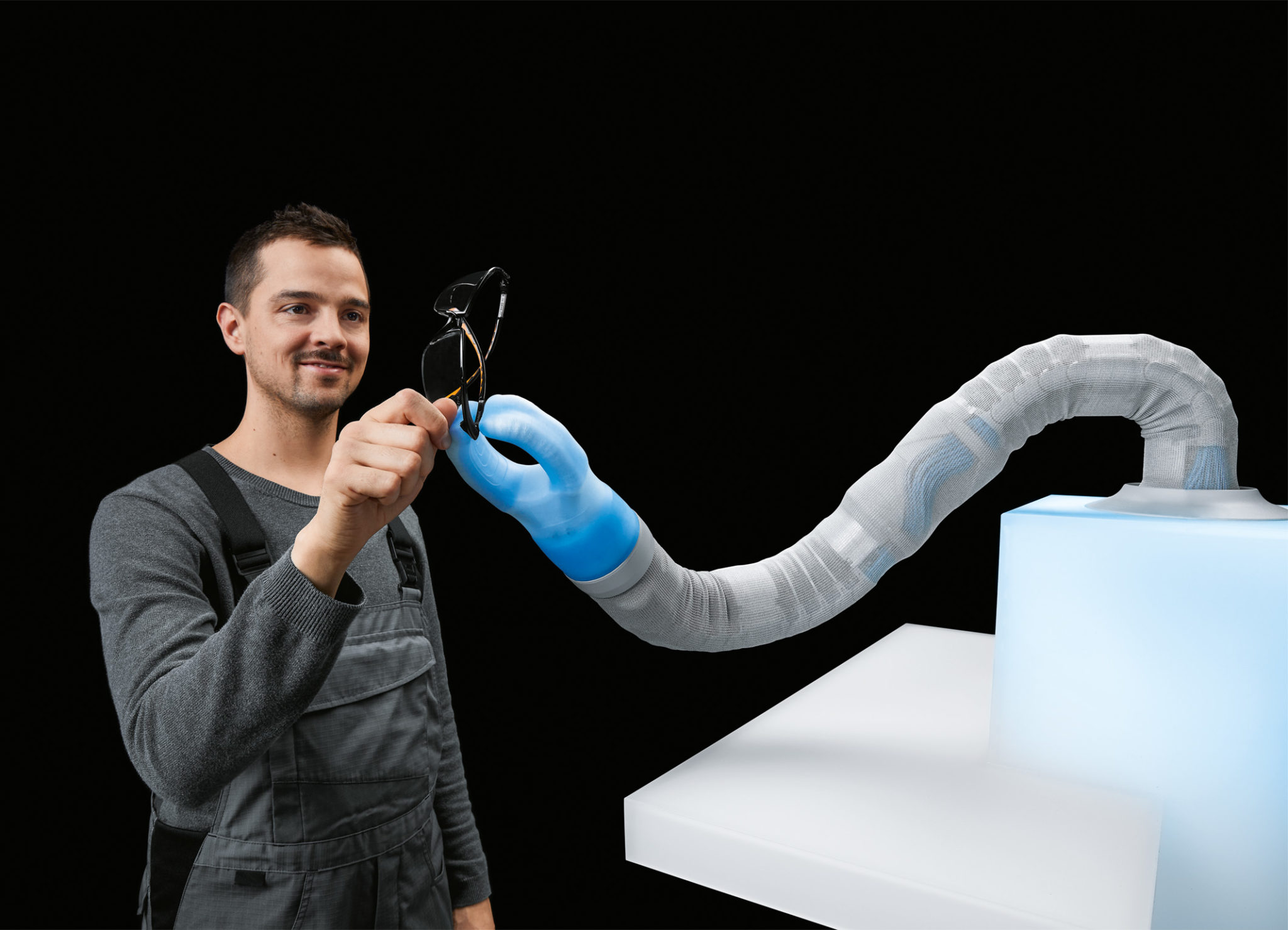
Foto: Ufficio Stampa
BionicFinWave: robot subacquei
La natura ci insegna con esempi impressionanti quale sia l’aspetto di un sistema di propulsione ideale per determinati movimenti natatori. Per andare avanti, i policladi e le seppie creano con le pinne un’onda che si propaga in avanti per la loro intera lunghezza. Per il BionicFinWave, il team di bionici si è ispirato a questi movimenti ondulatori delle pinne. Il movimento ondulatorio spinge l’acqua all’indietro, generando così una spinta in avanti. Questo principio permette alla BionicFinWave di spostarsi in avanti e all’indietro grazie ad un sistema di tubazione in polimetilmetacrilato.
Entrambe le pinne laterali sono completamente ricoperte di silicone e funzionanano senza controventamenti o elementi di sostegno. Le due pinne sono fissate a destra e a sinistra di nove piccoli bracci di leva, che vengono azionati da due servo motori. Due alberi motore adiacenti trasmettono la potenza alla leva, in modo che le due pinne possano muoversi individualmente e generare diversi tipi di onde. Gli alberi sono, in particolare, adatti ad andature lente e precise e fanno girare in vortice meno acqua rispetto, ad esempio, alla propulsione ad avvitamento.
Tra ogni segmento della leva si trova un giunto cardanico, per fare in modo che gli alberi motore siano flessibili e pieghevoli. A tale scopo, gli alberi a motore, i giunti e la biella sono stati fabbricati in plastica, in un unico pezzo realizzato con il processo di stampa 3D. Le restanti parti del BionicFinWave sono realizzate anche con la stampa 3D, cosa che gli permette di avere delle geometrie complesse. Con le loro cavità, agiscono come unità di flottazione. Allo stesso tempo, l’intera tecnologia di controllo e regolazione è impermeabile, installata in sicurezza e sincronizzata in uno spazio molto ristretto.
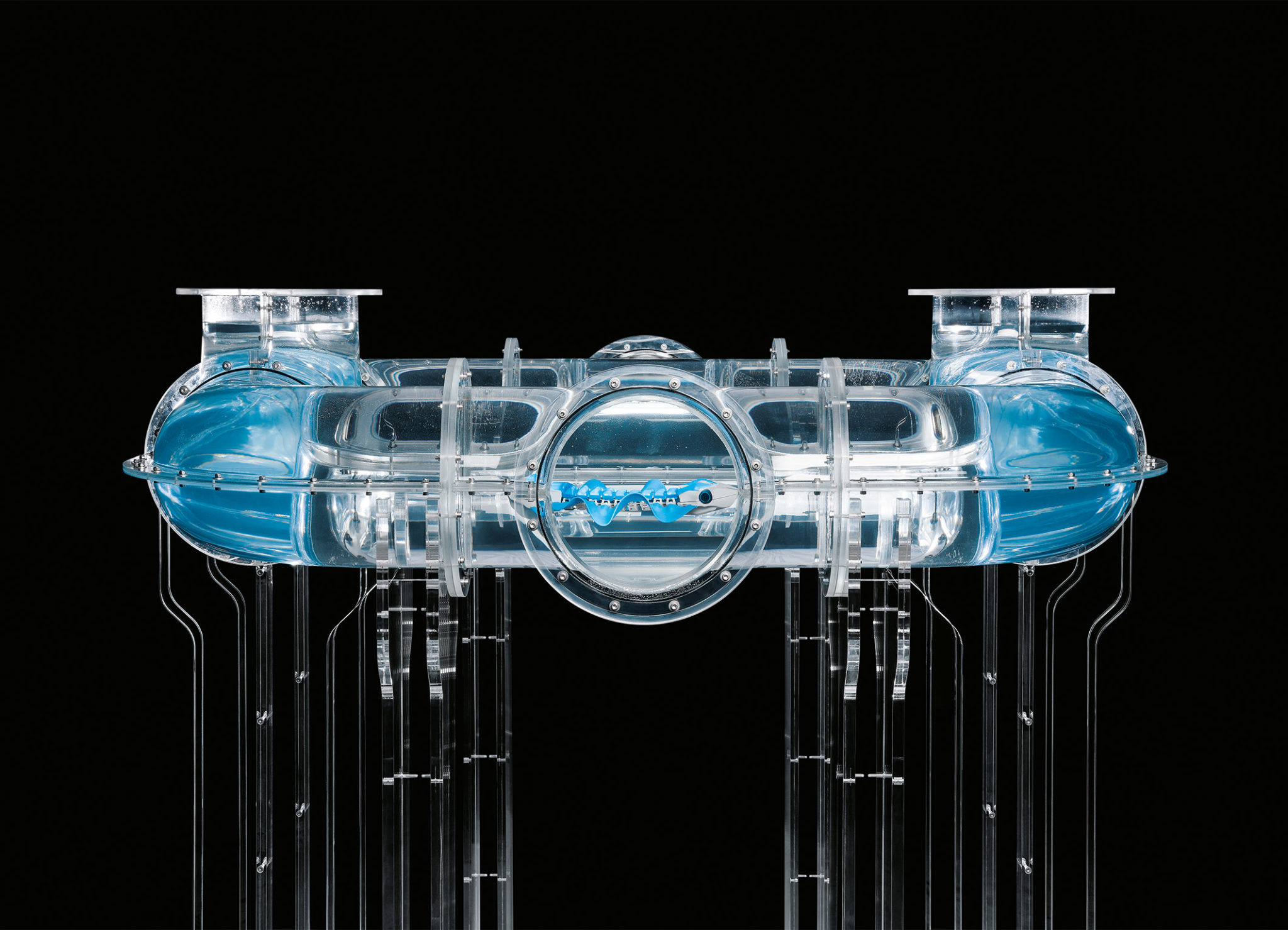
Foto: Philipp Freudigmann